�����ǻ����˵ĸ�֪���������ӵ�һ���Ӿ����������ģ̬�ںϵķ����ݽ������գ�����������ѧ����Ƽ����Ŀ����Ŷӽ� CMC-Na/PAM/MXene ����ˮ��������Ƥ���� AI ��ģ̬�㷨��Ƚ�ϣ�������һ��������ѹ�����¶ȸ�֪��һ������ܽ���ϵͳ��Ϊ�����˴�����һ�� ����˼����Ƥ�������ƶ��˻��������� ��ȫ�н����� �½Ρ�
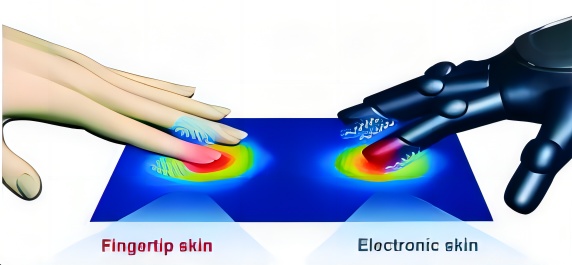
����ͼ3 ����ָ��Ƥ���븴��ˮ��������Ƥ���Ĵ�����֪Ч���Ա�
������ά�źŲɼ��������� �������� ����
������ͳ��������������ʵ�ּ�ѹ����⣬������ϵͳ���� MXene ����ˮ�����ĸ����������ԣ������˵��� - ���Ӹ��ϵ������磬��ͬʱ�ɼ�ѹ�����α䡢�¶ȡ�ʪ�ȵȶ��������źš�ͨ�����ѧϰ�㷨���źŽ���ʵʱ���������ȡ����ͼ�жϣ��������ܹ�����ʶ���������Ӳ���ֲڶȡ���״���¶ȵ���Ϣ��ʶ��ȷ�ʳ��� 93%��ʵ�� �����������⡱ �Ľ������顣
������ץȡ����Ϊ�������ظ�ϵͳ�Ļ����˽Ӵ�����ʱ�������ܸ�֪ �������ˡ�������ͬ���ж�������ʡ��������¶ȣ��Զ�����ץȡ�����뷽ʽ������ѹ��������Ʒ����䣬����ʵ�� �����ԡ����ܡ���ȫ�� �IJ�����
�����ೡ�����䣺��ʵ���ҵ���ʵ����
����Ϊ���㲻ͬ�����Ӧ��������Ƽ�����Ŷ����ϵͳ���ȶ����뻷����Ӧ�Խ�����ר���Ż���ʹ�����ڸ��ӡ���̬����ʵ�������ȶ�������
����ҽ�ƿ������������ظ�ϵͳ�Ŀ�����е�֣��ɸ��ݻ���֫���ʵʱ��������ѵ����������࣬Ϊ�����˻����ṩ���Ի��������Ʒ���������ѵ����ȫ�������ʶȡ�
������ҵ���쳡���������˿�ͨ��������֪�㲿����С覴á�����������װ���϶���ֲ��Ӿ�����ä����ʵ�ָ߾���װ����������⡣
������ͥ��������������ͨ������Ĵ���������Ϊ���ˡ���ͯ�ṩ��ȫ�������Ʒ���ͷ�������ײ�˺�������ʹ�����顣
��������ͻ�ƣ���ģ̬�ںϵĹؼ�֧��
�����Ŷ�ͬ���������źſ����š����Ĵ������Դ����Эͬ�ȼ������⡣һ���棬ͨ���Ż� MXene ����ˮ�����Ľṹ��ƣ������˴������ڸߵ��¡���ʪ���۳��ȸ��ӻ����µ��ź��ȶ��ԣ���һ���棬������ר�ö�ģ̬�ں��㷨��ʵ���˵���Ƥ�����Ӿ����������������ݵ�ʵʱЭͬ������������ȫ����֪ģ�ͣ��û������ڷǽṹ��������Ҳ���������ߡ��ȶ���ҵ��
����ҵ��ר�ұ�ʾ������ ������Ƥ�� + AI ��ģ̬��֪�� �ķ�����ͻ���˵�һ��֪�����ľ��ޣ�����Ϊ��һ�����ܻ����˵ĺ��ľ����������ż����ij��������������˽��� ��ִ��ָ��Ĺ��ߡ� ת��Ϊ ���ܸ�֪���ύ���������� �����ܻ�飬Ϊҽ�ơ���ҵ������ȶ��������������Ա仯��
������ƽ̨��������Ϣ�����ݺ�ȷ�����ṩ��Ϣ��ԭ��λ����֯�����е���ȫ����!